

描述
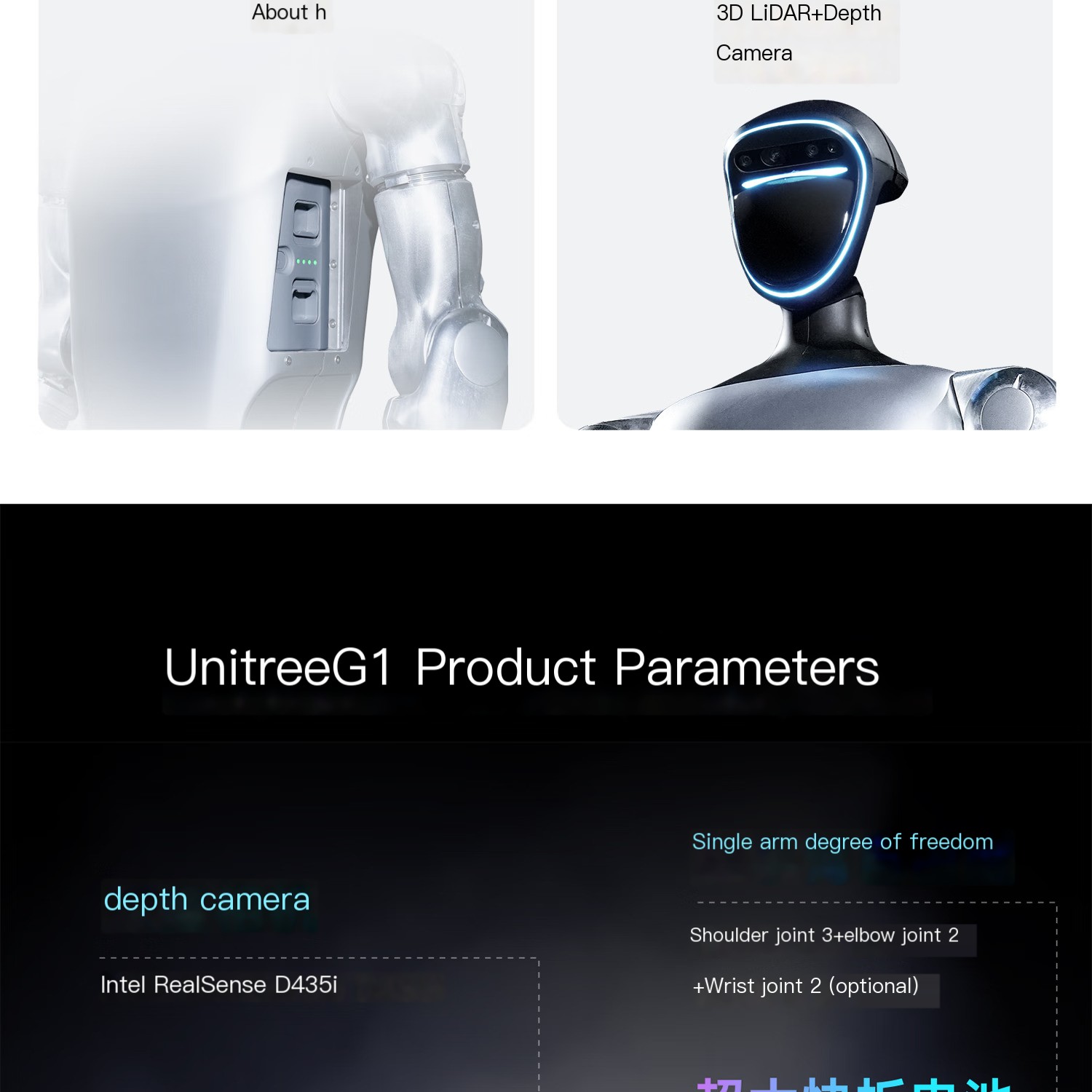
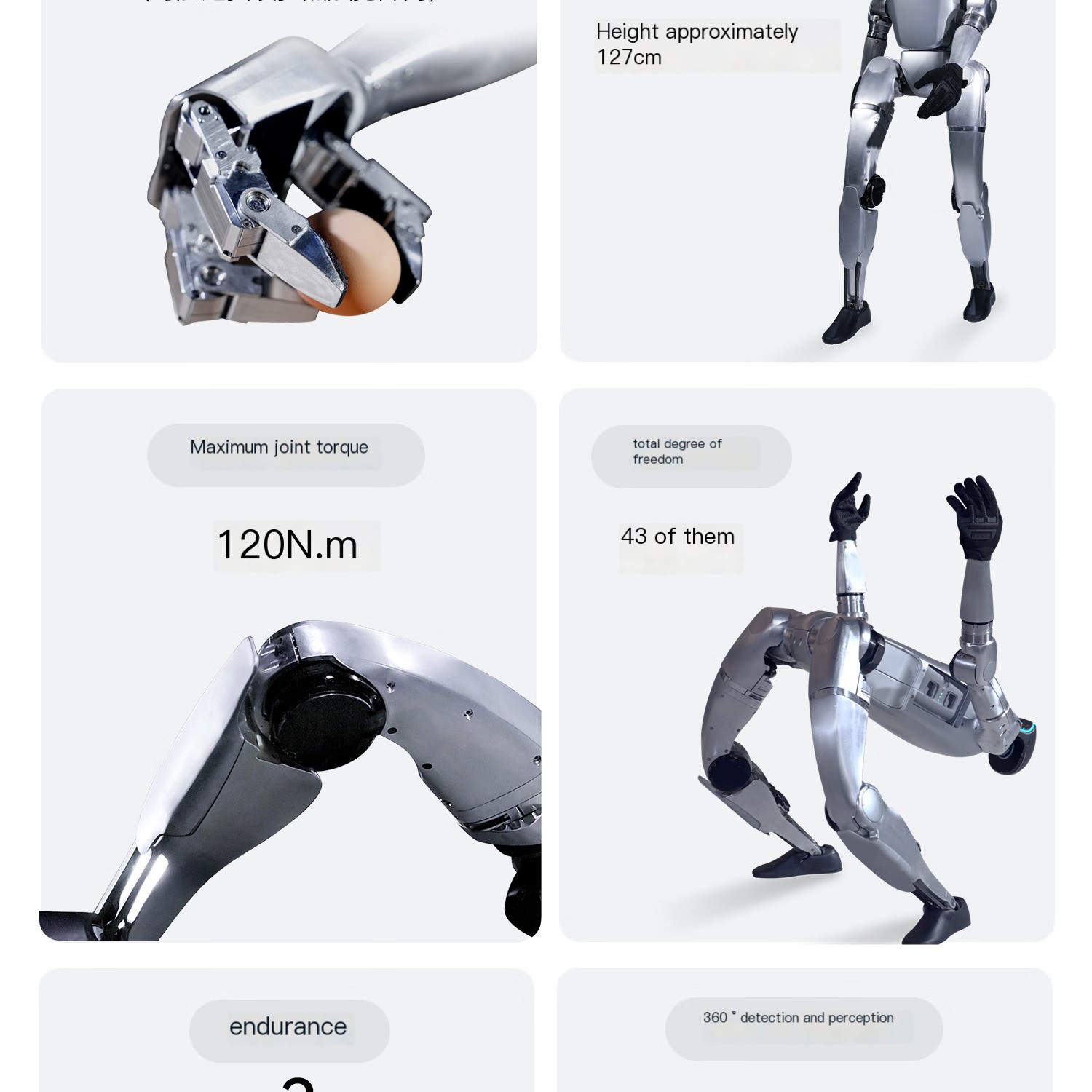
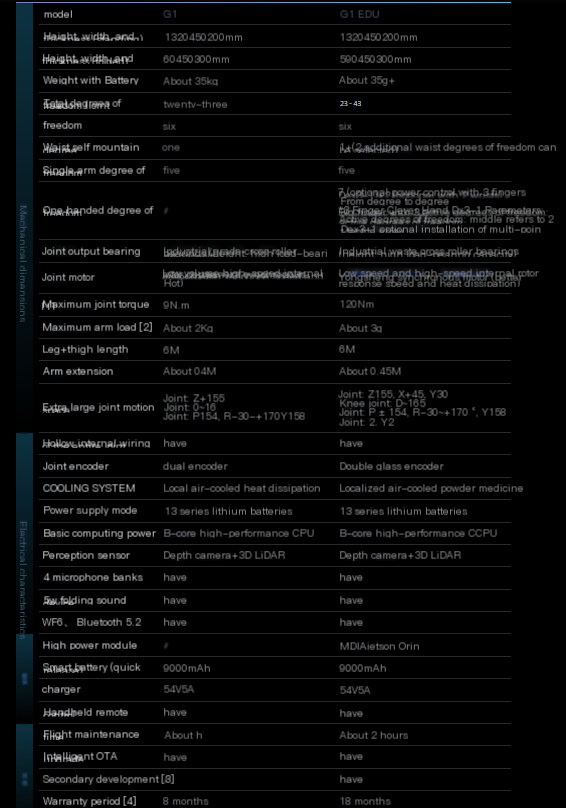
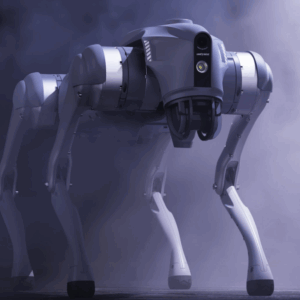
Parameters: Height 127cm, weight 35kg; equipped with 23 joint motors (single leg 6 degrees of freedom+waist 1 degree of freedom+single arm 5 degrees of freedom), knee joint torque 90N · m; Equipped with a depth camera and 3D LiDAR to achieve 360 ° perception; Endurance of 2 hours, movement speed of 2m/s167.
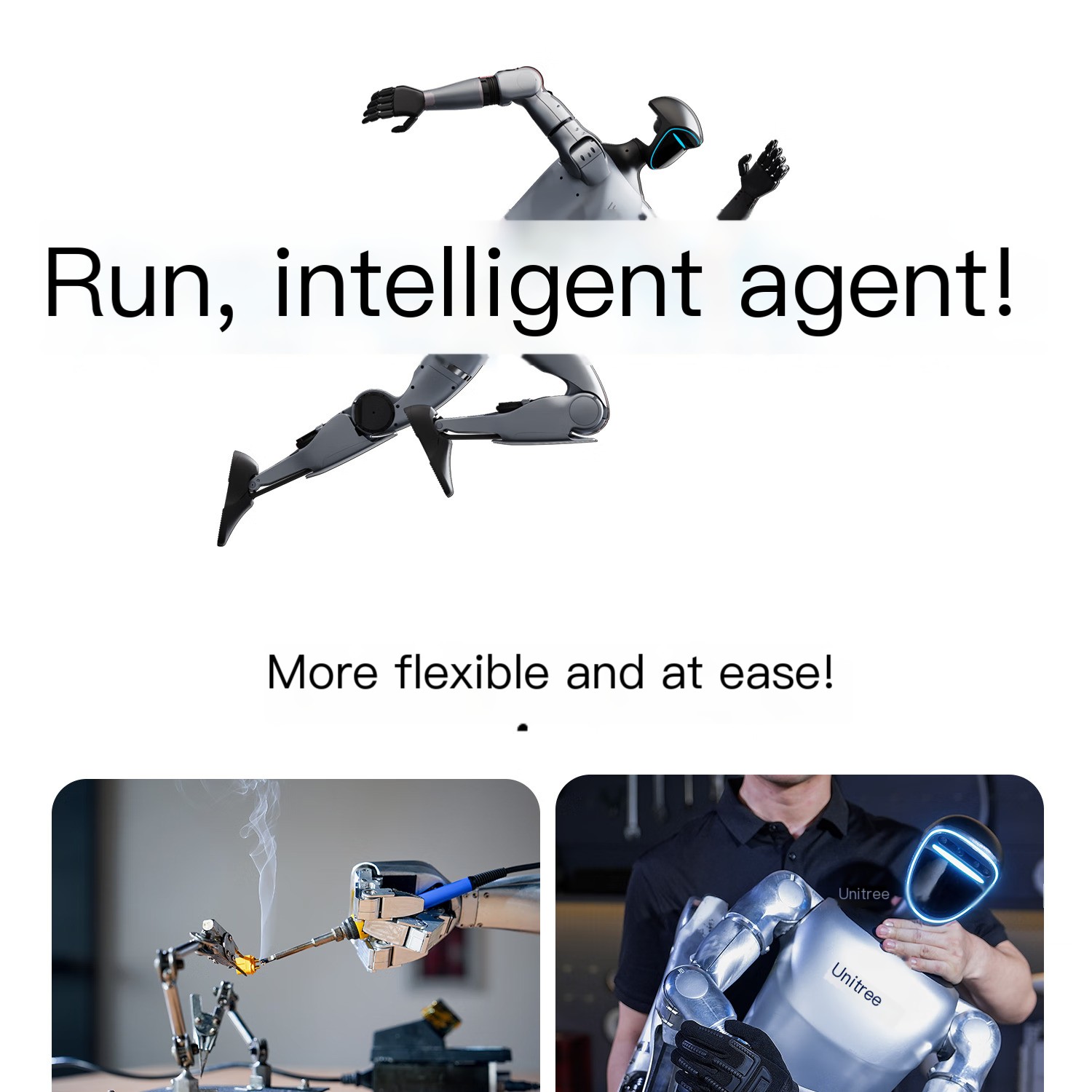
Function: Supports walking on complex terrains (slopes/grasslands/stairs), running, single leg jumping, and 360 ° turning; Continuously upgrading the action library through AI reinforcement learning (such as adding combat and balance actions in OTA); The basic version lacks dexterous hands and relies on arm joints 136 for operation.
Application environment: Suitable for scientific research and development, competition scenarios (such as football matches, robot sports games), and unstructured terrain inspection; Industrial landing requires the cooperation of specialized algorithm packages (such as power inspection)


![LeSen Robot [Same as Musk] Megatron G1 Flagship Series Robot Automatic Transformers Intelligent Robot](https://www.lingobuy.com/wp-content/uploads/2025/06/6cae1875ly4hebwdioww4j20u018g12r-300x300.jpg)
评价
目前还没有评价